
The guitar controller is split into two sections: left-hand and right-hand controllers.
The player may adjust the pitch of the tone by bending his fingers and pressing the glove on the left-hand controller.
The right-hand controller is a stick that must be shook in order to activate the air-guitar sound.
The distance between the right and left hands may also be adjusted to tune the tones, imitating the different frets on the guitar neck.
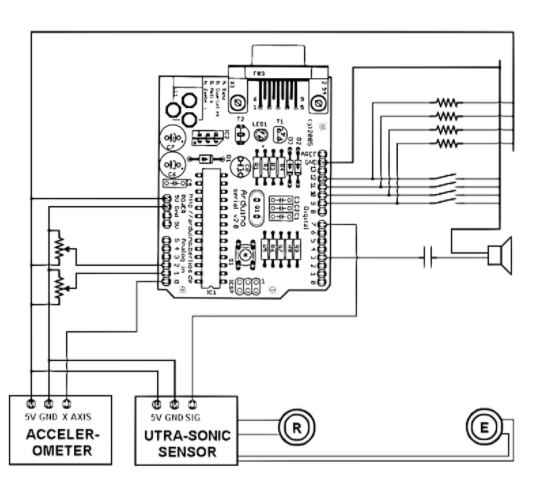
An accelerometer is used to “feel” the stick shake, a hacked ultrasonic sensor is used to detect the distance between the right hand and the stick, and conductive fabric is used to make the glove.
Components :
Wires: there are a lot of them in this prototype version. They were utilised to link the two gloves as well as the Arduino components. Make this element of the design wireless if you want to improve it!
Accelerometer: utilised to detect shaking in the stick in your right hand. We utilised a three-axis accellerometer, although a one-axis accellerometer will suffice.
Ultrasonic sensor: we utilised Parallax #28015 to measure the distance between the player’s hands.
Conductive and stretch fabric: for the glove’s construction,
Arduino: The Guitar’s brain that controls everything. It’s acceptable to use an Arduino Diecimila.
Potentiometers: A potentiometer with a maximum resistance of 1KOhm-1MOhm can be used to modify various parameters.
Hot melt glue is a quick and easy technique to keep things together.
A female 3.5 mm jack is used for audio output.
Standard electronic components: 10k resistors, 10uF capacitors, LEDs, and an arduino power supply. (A 9V battery will suffice.)
Schematics :

Make the Glove :
One ultrasonic receiver and four buttons are included in the glove.
On the Arduino board, the glove has one big region that is just linked to ground. When a finger is pushed against the palm, a connection is formed between the finger’s conductive fabric and the palm.
Two distinct glove models. One includes removable fingers, allowing players with both little and big hands to play. The other variant is sewn directly onto a regular glove. I’d prefer the second version because it’s easier to construct and install.
Code :
// An array containing the waveform
// of a guitar sound
char waveform[] =
{125, 148, 171, 194, 209, 230, 252, 255,
253, 244, 235, 223, 207, 184, 169, 167,
163, 158, 146, 131, 126, 129, 134, 127,
105, 80, 58, 51,38, 22, 12, 2, 10, 35,
58, 75, 89, 103, 120, 141, 150, 148, 145,
144, 140, 129, 116, 105, 95, 86, 75, 72,
73, 76, 88, 103, 117, 121, 120, 115, 120,
143, 159, 162, 156, 155, 163, 184, 202,
214, 215, 211, 213, 212, 205, 196, 182,
162, 142, 118, 99, 84, 68, 54, 40, 28,
19, 10, 7, 0, 0, 5, 9, 14, 21, 33,
49, 59, 65, 75, 92, 110};
// We use this waveform to change the
// volume of the output
char waveformVolume[] =
{125, 148, 171, 194, 209, 230, 252, 255,
253, 244, 235, 223, 207, 184, 169, 167,
163, 158, 146, 131, 126, 129, 134, 127,
105, 80, 58, 51,38, 22, 12, 2, 10, 35,
58, 75, 89, 103, 120, 141, 150, 148, 145,
144, 140, 129, 116, 105, 95, 86, 75, 72,
73, 76, 88, 103, 117, 121, 120, 115, 120,
143, 159, 162, 156, 155, 163, 184, 202,
214, 215, 211, 213, 212, 205, 196, 182,
162, 142, 118, 99, 84, 68, 54, 40, 28,
19, 10, 7, 0, 0, 5, 9, 14, 21, 33,
49, 59, 65, 75, 92, 110};
// An array used as a buffer to avoid
// erroneous punctual distance
// measurements
unsigned int distance_buffer[] = {16000,
16000, 16000, 16000, 16000, 16000, 16000,
16000, 16000, 16000, 16000, 16000, 16000,
16000, 16000, 16000};
const int distance_length = 3;
int distance_index = 0;
// The overflow values for 2 octaves
int frequencies[] = { 39, 42, 44, 47,
50, 52, 56, 59, 63, 66, 70, 74, 79,
84, 89, 94, 100, 105, 112, 118, 126,
133, 141, 149};
// Initial pitch
int pitch = 160;
// Initial volume and acceleration
// parameter
int lastAcc = 0;
float volume = 0;
//audio playback on pin 3
byte speakerpin = 3;
//index variable for position in
//waveform
volatile byte waveindex = 0
volatile byte currentvalue = 0;
// Pin used for ultra-sonic sensor
const int pingPin = 7;
// Pins for the potentiometers
const int sustainPin = 1;
const int sensitivityPin = 2;
// Pins for each finger of the left
// hand
const int finger1 = 9;
const int finger2 = 10;
const int finger3 = 11;
const int finger4 = 12;
int fingerValue = 0;
long duration, inches, cm;
void setup() {
pinMode(3,OUTPUT); //Speaker on pin 3
pinMode(finger1,INPUT);
pinMode(finger2,INPUT);
pinMode(finger3,INPUT);
pinMode(finger4,INPUT);
/**************************
PWM audio configuration
****************************/
//set Timer2 to fast PWM mode
//(doubles PWM frequency)
bitSet(TCCR2A, WGM21);
bitSet(TCCR2B, CS20);
bitClear(TCCR2B, CS21);
bitClear(TCCR2B, CS22);
//enable interrupts now that registers
// have been set
sei();
/*************************
Timer 1 interrupt configuration
*************************/
//disable interrupts while
// registers are configured
cli();
/* Normal port operation, pins disconnected
from timer operation (breaking pwm) */
bitClear(TCCR1A, COM1A1);
bitClear(TCCR1A, COM1A1);
bitClear(TCCR1A, COM1A1);
bitClear(TCCR1A, COM1A1);
/* Mode 4, CTC with TOP set by register
OCR1A. Allows us to set variable timing for
the interrupt by writing new values to
OCR1A. */
bitClear(TCCR1A, WGM10);
bitClear(TCCR1A, WGM11);
bitSet(TCCR1B, WGM12);
bitClear(TCCR1B, WGM13);
/ set the clock prescaler to /8. /
bitClear(TCCR1B, CS10);
bitSet(TCCR1B, CS11);
bitClear(TCCR1B, CS12);
/* Disable Force Output Compare for
Channels A and B. */
bitClear(TCCR1C, FOC1A);
bitClear(TCCR1C, FOC1B);
/* Initializes Output Compare
Register A at 160 to set the
initial pitch */
OCR1A = 160;
//disable input capture interrupt
bitClear(TIMSK1, ICIE1);
//disable Output
//Compare B Match Interrupt
bitClear(TIMSK1, OCIE1B);
//enable Output
//Compare A Match Interrupt
bitSet(TIMSK1, OCIE1A);
//disable Overflow Interrupt
bitClear(TIMSK1, TOIE1);
// enable interrupts now that
// registers have been set
sei();
}
// Timer overflow handler
ISR(TIMER1_COMPA_vect) {
/* timer1 ISR. Every time it
is called it sets speakerpin to the
next value in waveform[]. Frequency
modulation is done by changing the
timing between successive calls of
this function, e.g. for a 1KHz tone,
set the timing so that it runs
through waveform[] 1000 times
a second. */
// reset waveindex if it has reached
// the end of the array
if (waveindex > 102) {
waveindex = 0;
}
//Set the output value
if (volume > 0.03) {
analogWrite(speakerpin,
waveformVolume[waveindex]);
}
waveindex++;
// Update the pitch
OCR1A = pitch;
}
void loop()
{
// Desactivate interputs, send a ping
// message and wait for the answer.
cli();
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
duration = pulseIn(pingPin, HIGH, 2000);
sei();
// convert the time into a distance
// in centimetres
// and store in buffer
distance_buffer[distance_index++
% distance_length] = duration / 20;
//Find in the buffer the shortest
// distance measured
cm = 16000;
for(int i = 0; i < distance_length; i++) {
cm = min(cm, distance_buffer[i]);
}
// Check which fingers are pressed
fingerValue = 5;
if(!digitalRead(finger4)){
fingerValue = 4;
}
if(!digitalRead(finger3)){
fingerValue = 3;
}
if(!digitalRead(finger2)){
fingerValue = 2;
}
if(!digitalRead(finger1)){
fingerValue = 1;
}
// Update the sustain and
// sensitivity values
float sustain =
map(analogRead(sustainPin), 0,
1024, 101, 130) / 100.0;
int sensitivity =
map(analogRead(sensitivityPin),
0, 1024, 100, 200);
// Update the volume
volume = volume / sustain;
if (volume < 0) {
volume = 0;
}
// Check the accelerometer
int acc = analogRead(0);
int accDiff = lastAcc - acc;
// Update the volume value
if (accDiff > 5 * (200 - sensitivity)) {
volume += (float)
pow(accDiff,
sensitivity / 100.0) / 50000;
}
lastAcc = acc;
// Check that volume is not higher than 1
if(volume > .95) {
volume = .95;
}
// Update the volume in the waveform
for(int i = 0; i <= 102; i++) {
waveformVolume[i] =
((waveform[i] - 127) * volume) + 127;
}
// Set the pitch according to the distance
// between the two hands and the
// fingers pressed
if(cm < 102 && cm > 0) {
if(cm > 30) {
pitch = frequencies[7 +
(((cm - 30) / 24) * 4 + fingerValue - 1)];
}else{
pitch = map(cm, 0, 30, 39, 79);
}
}else{
pitch = frequencies[7 +
(((102 - 30) / 24) * 4 + fingerValue - 1)];
}
// Delay to avoid bouncing signals
delay(50);
}
“Life is Simple, Just help someone you’ll feel satisfied.” – KP
– Helping Hands.

I found this helpful. So that I shared this with my friends thanks for further help 🙂